Produtos
ANTENA DIRECIONAL AUTOMÁTICA
As estações terrenas são projetadas para fornecerem comunicação em tempo real com os satélites. Elas enviam sinais de rádio para o satélite (uplink), recebem transmissões de dados (downlink) e, em alguns casos, servem como centro de comando e controle para a rede de satélites. As características que se deseja em estações terrenas ou em seu conjunto de equipamentos são principalmente funções de comando e controle, sistema de monitoramento da saúde dos satélites, sistema de rastreamento (por meio dos elementos orbitais) e localização instantânea (latitude, longitude e altitude), além de sistemas que permitem a retransmissão dos dados captados para os usuários interessados e a possibilidade de controle remoto.
Atualmente, players mundiais oferecem equipamentos com as funcionalidades relacionadas, entretanto, têm um alto custo, além da necessidade de importação. Basicamente, nações dotadas de economias fortes e sistemas científicos robustos são as que estão na vanguarda do desenvolvimento dos sistemas espaciais. A compra de determinados equipamentos e sistemas essenciais para o desenvolvimento de atividades espaciais torna os países parcialmente dependentes de um determinado fabricante, pois a mudança de um sistema para outro pode envolver altos custos.
Diante disso, no sentido de se ter baixo custo e independência tecnológica em relação aos players mundiais, foi criada a ADA (Antena Direcional Automática) com o intuito de fazer parte de uma estação terrena que, juntamente com suas outras unidades, formarão a rede de estações terrenas DATASAT.
A ADA é um sistema de direcionamento automático de antenas, composto por um conjunto de motores, redutores e controlador, que recebe as coordenadas de posicionamento e é capaz de apontar suas antenas para o objeto que se deseja captar ou enviar sinais, podendo ser uma sonda ou um satélite, e suas variações. O conjunto se conecta a um computador que conta com equipamentos de captura de sinais e um software de controle, o ADASERVER. Com movimento de elevação, em uma cúpula de 0º até 90º, e azimute de 0º até 360º, a ADA pode apontar uma antena conectada a ela em qualquer direção, captar seus sinais e disponibilizá-los aos usuários interessados.
Ao considerar o estado da arte de estações terrenas avaliadas para pequenos satélites (Venturini, C. McVittie, T., 2014 e NASA, 2018), com ênfase no CubeSat, optou-se por equipar a ADA para operar nas frequências VHF, UHF, Banda S e Banda X. As antenas VHF e UHF já foram construídas e testadas.
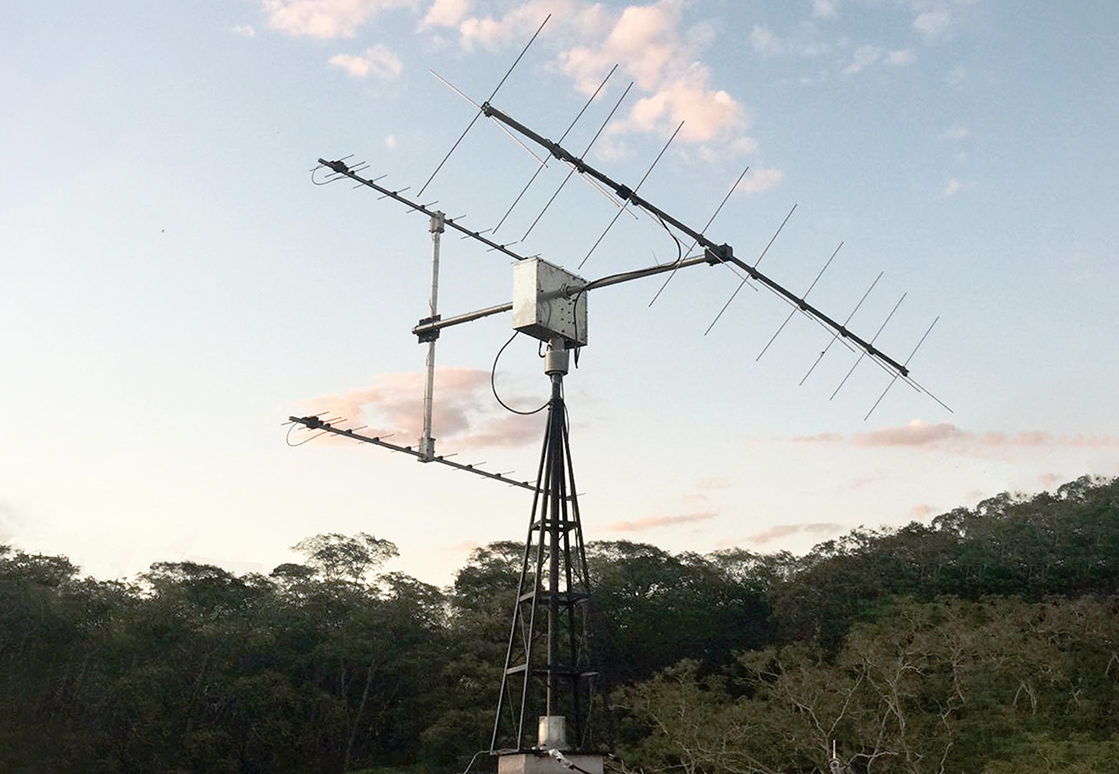
Uma unidade instalada pode ser vista na imagem acima. As características principais da ADA são:
- Capazes de posicionar a antena em qualquer direção, considerando azimute de 0° a 360° e elevação de 0° a 90°;
- Capaz de posicionar a antena com precisão de 0.1°;
- Sistema redutor capaz de produzir um torque de 4800kgf x cm, sendo possível girar/elevar antenas com até 12kg distribuídos;
- Motor capaz de girar/elevar antenas com até 500kg/cm de torque distribuído.
O sistema eletro/eletrônico, controle e rádiofrequência fica completamente protegido em uma caixa mecânica, revestida e vedada, a fim de suportar as intempéries de ordem climáticas.
Os benefícios que a ADA proporciona são:
- Custo acessível;
- Produto de qualidade superior;
- Fácil instalação;
- Simples operação;
- Rastreamento automático de satélites, podendo ser previamente agendados;
- Controle remoto de operação e aquisição de dados.
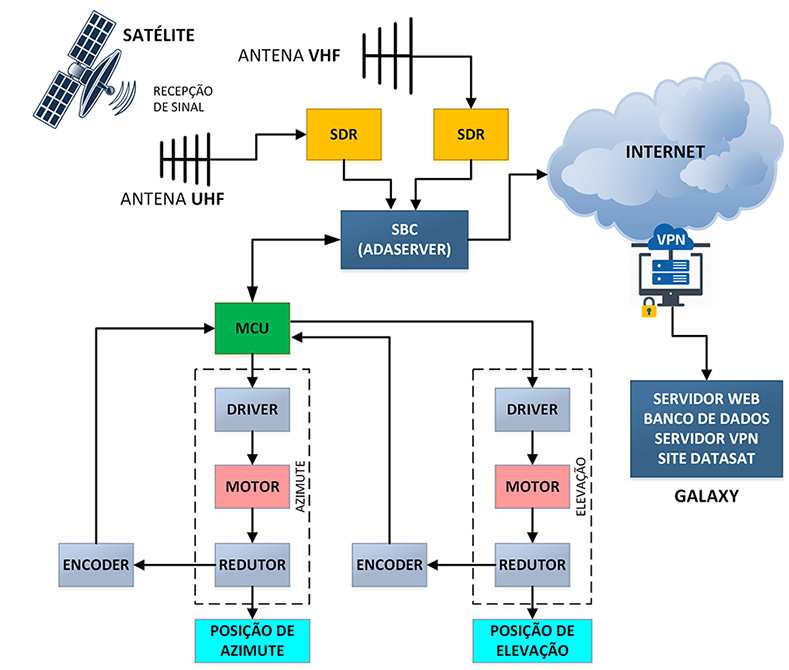
A ADA foi projetada de forma modular com o objetivo de simplificar sua montagem e sua instalação, permitindo que os requisitos eletromecânicos e eletrônicos fossem cumpridos. O Módulo Externo é composto pelo conjunto de antenas e os motores e redutores que são parte do sistema de posicionamento. O Módulo Interno compreende o controlador do sistema de posicionamento da antena e o ADASERVER que comanda/recebe o sinal enviado/captado pela antena, conforme figura 3, e que pode ser operado remotamente.
O controlador do sistema de posicionamento foi desenvolvido para acionar os motores e redutores no sentido de posicionar as antenas em direção ao alvo no momento de sua passagem a partir de coordenadas azimute e elevação recebida do ADASERVER. Com isso, a antena será capaz de acompanhar o alvo ao longo de sua órbita e com precisão no movimento.
Ao mesmo tempo que o ADASERVER envia as coordenadas de azimute e elevação para o sistema de posicionamento, ele também sintoniza a frequência do SDR para comando e recepção dos sinais do alvo, isto é, do satélite e suas variações ou da sonda.
Basicamente tem-se:
- A partir do cadastro do satélite no NORAD – North American Aerospace Defense Command, tem-se a determinação automática do seu posicionamento por meio dos elementos orbitais no padrão TLE – Two Lines Elements ou é possível ainda inserir esses elementos manualmente;
- A partir da escolha do satélite e sua frequência de uplink e downlink, o ADA aponta automaticamente para o alvo de maneira contínua durante sua passagem, corrige o efeito Doppler, recebe as telemetrias e envia os telecomandos. A recepção das informações é gravada em um arquivo com a respectiva identificação do satélite monitorado ou com os comandos enviados de acordo com sua codificação. A codificação de envio de telecomando se dá por linha de comando ou arquivo texto com a lista de comandos ou comando via TCP/IP;
- O arquivo com as informações recebidas e de comandos enviados podem ser lidos remotamente;
- Os dados recebidos e processados podem ser armazenados e distribuídos em um Centro de Dados disponível na Internet.
O sistema de direcionamento automático da ADA utiliza um direcionador mecânico acionado por um sistema de moto-redutores capacitando a antena no acompanhamento do satélite e suas variações com precisão no movimento ao longo de sua órbita, seguindo a trajetória previamente calculada e cujas coordenadas de apontamento são enviadas em intervalos regulares para o mecanismo. A geometria escolhida para o projeto foi a do tipo “elevação sobre azimute”, por ser simples e pela relação direta entre os ângulos de posicionamento e as coordenadas usadas para o direcionamento da antena.
O sistema é constituído de conjuntos moto-redutores, deslocando-se simultaneamente em azimute e elevação. Utiliza-se motor de passo de precisão, devido a sua simplicidade de controle, tanto no posicionamento quanto na velocidade, pois esse tipo de motor realiza seu deslocamento em ângulos precisos, que são diretamente proporcionais aos pulsos enviados ao driver, assim como sua velocidade pode ser controlada através da frequência dos pulsos. Dessa forma, o controle pode ser realizado sem a necessidade de uma realimentação (malha fechada), o que torna o custo da aplicação menor.